For closed-loop control of stepper motor operation, a two-input single-output fuzzy controller is used here. The two input quantities are the deviation of the angular displacement of the antenna array and the rate of change of the deviation, and the output is the operating frequency of the stepper motor. A typical fuzzy controller contains three links: precise amount of fuzzification, fuzzy reasoning and anti-fuzzification. In order to improve the real-time and tracking accuracy, the offline fuzzy inference operation is used here to formulate the fuzzy decision table, store it in EPRO, and use the look-up table method to determine the output. Due to the large number of measurement parameters of the radome antenna measuring instrument and the change of the measurement environment (such as the influence of outdoor wind load), in general, the knowledge base based on the original manual intermittent fixed-point tracking measurement experience often has great limitations. Sex, causing control effects to be affected. To this end, after the anti-fuzzification link, an adaptive parameter adjustment link has been added to adapt to the mutation of different measurement occasions and control processes, and to improve the tracking effect. Therefore, the block diagram of the closed-loop adaptive fuzzy controller designed in this paper is shown in Figure 1. 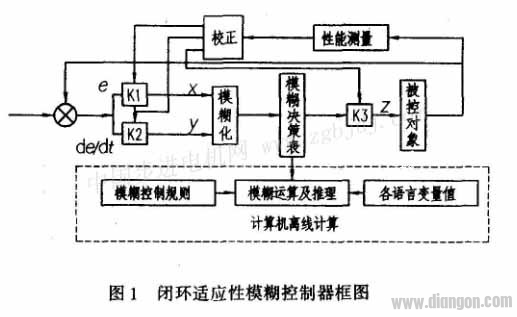 1. Accurate amount of fuzzification For the azimuth of the feedback measurement, the angular displacement deviation of the pitch axis and the exact value of the deviation rate signal, the fuzzification is first performed. For the angular displacement deviation, the deviation change rate and the control output, respectively, it can be regarded as the linguistic variables E, E7 and F on the discrete integer domain [-6, +6], and the linguistic variables of E, E7 and F are valued. It is: PL (Zhengda), PM (median), PS (positive small), O, NS (negative small), NM (negative medium), NL (negative large) 7 grades, its membership function takes a triangle distribution, as shown in the figure 2 is shown.
1. Accurate amount of fuzzification For the azimuth of the feedback measurement, the angular displacement deviation of the pitch axis and the exact value of the deviation rate signal, the fuzzification is first performed. For the angular displacement deviation, the deviation change rate and the control output, respectively, it can be regarded as the linguistic variables E, E7 and F on the discrete integer domain [-6, +6], and the linguistic variables of E, E7 and F are valued. It is: PL (Zhengda), PM (median), PS (positive small), O, NS (negative small), NM (negative medium), NL (negative large) 7 grades, its membership function takes a triangle distribution, as shown in the figure 2 is shown. 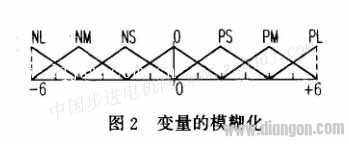 2. Fuzzy reasoning and decision table establishment Fuzzy reasoning is a fuzzy knowledge base composed of a series of linguistic rules, the input variables are reasoned, and the process of obtaining the control quantity. For the fuzzy controller structure of Fig. 1, the Mamdani reasoning method is adopted here. And take the following fuzzy inference rules:
2. Fuzzy reasoning and decision table establishment Fuzzy reasoning is a fuzzy knowledge base composed of a series of linguistic rules, the input variables are reasoned, and the process of obtaining the control quantity. For the fuzzy controller structure of Fig. 1, the Mamdani reasoning method is adopted here. And take the following fuzzy inference rules:  Take i=0,1,2,...,7 and j=0,1,2,...,7 to generate 7×7 control rules from equation (1), according to the above classification of the value of the linguistic variable, the rules The basis is shown in Table 1.
Take i=0,1,2,...,7 and j=0,1,2,...,7 to generate 7×7 control rules from equation (1), according to the above classification of the value of the linguistic variable, the rules The basis is shown in Table 1. 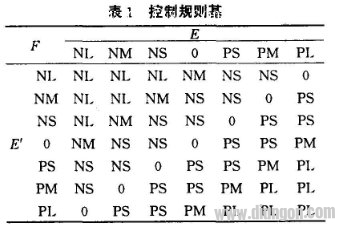 According to the Mamdani reasoning method, there is A × B × C, and its corresponding fuzzy relationship is the most:
According to the Mamdani reasoning method, there is A × B × C, and its corresponding fuzzy relationship is the most: 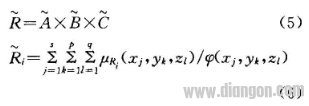 In equations (2) to (6), the membership degrees of fuzzy sets A, B, C, and R are respectively:
In equations (2) to (6), the membership degrees of fuzzy sets A, B, C, and R are respectively: ![]() For known inputs A, B, the output C can be obtained by:
For known inputs A, B, the output C can be obtained by:  3. Accuracy of the fuzzy quantity According to the above fuzzy inference, the fuzzy control quantity needs to be refined before it can be used for actual control. For the precise processing of fuzzy quantities, this paper uses the weighted average method widely used in industrial control:
3. Accuracy of the fuzzy quantity According to the above fuzzy inference, the fuzzy control quantity needs to be refined before it can be used for actual control. For the precise processing of fuzzy quantities, this paper uses the weighted average method widely used in industrial control:  According to the above reasoning, the fuzzy decision table is obtained offline, and the computer memory is stored. In the tracking control process, the control quantity is quickly obtained by the look-up table method, thereby greatly improving the real-time tracking ability and tracking accuracy. 4. Adaptive adjustment of the quantization factor Because the radome antenna base tracking measuring instrument has many measurement parameters, and there are both static measurement and dynamic measurement, the above-mentioned decision table fuzzy reasoning knowledge base is zero angle (zero position) in one direction. In the other direction, the experience of manual tracking measurement is within the range of -60 degrees to +60 degrees. In other cases, the fuzzy control effect is not necessarily good, so in order to make the tracking effect better, On the basis of the basic fuzzy controller, the adaptive adjustment of the input and output quantization factors is added to better adapt to each measurement occasion. When the deviation e or the deviation change rate ΔP is large, the reduction of K 1 and K 2 reduces the resolution within a large deviation range, thereby obtaining a gentle control characteristic and ensuring the stability of the system; and increasing K 3 to improve the rapidity. Improve the dynamic performance of the system. When the deviation e or the deviation change rate ΔP is small, the system is close to the steady state, then the adjustment increases K 1 , K 2 , improves the resolution of the system to small deviation, and improves the sensitivity of the control; at the same time, the K 3 is reduced to avoid the super Harmonize the oscillations so that the system enters the steady-state accuracy range as soon as possible. The adjustment rules of the quantization factors K 1 , K 2 and K 3 are shown in Fig. 3.
According to the above reasoning, the fuzzy decision table is obtained offline, and the computer memory is stored. In the tracking control process, the control quantity is quickly obtained by the look-up table method, thereby greatly improving the real-time tracking ability and tracking accuracy. 4. Adaptive adjustment of the quantization factor Because the radome antenna base tracking measuring instrument has many measurement parameters, and there are both static measurement and dynamic measurement, the above-mentioned decision table fuzzy reasoning knowledge base is zero angle (zero position) in one direction. In the other direction, the experience of manual tracking measurement is within the range of -60 degrees to +60 degrees. In other cases, the fuzzy control effect is not necessarily good, so in order to make the tracking effect better, On the basis of the basic fuzzy controller, the adaptive adjustment of the input and output quantization factors is added to better adapt to each measurement occasion. When the deviation e or the deviation change rate ΔP is large, the reduction of K 1 and K 2 reduces the resolution within a large deviation range, thereby obtaining a gentle control characteristic and ensuring the stability of the system; and increasing K 3 to improve the rapidity. Improve the dynamic performance of the system. When the deviation e or the deviation change rate ΔP is small, the system is close to the steady state, then the adjustment increases K 1 , K 2 , improves the resolution of the system to small deviation, and improves the sensitivity of the control; at the same time, the K 3 is reduced to avoid the super Harmonize the oscillations so that the system enters the steady-state accuracy range as soon as possible. The adjustment rules of the quantization factors K 1 , K 2 and K 3 are shown in Fig. 3. 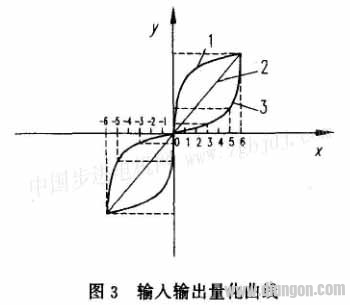 In Fig. 3, 1 is a quantization curve of two input quantities, the slope of each point is the adaptive adjustment rule of the quantization factors K 1 and K 2 , 2 is the constant quantization factor of the adjustment, and 3 is the quantization curve of the output quantity, The slope of each point is the adaptive regulation of K3.
In Fig. 3, 1 is a quantization curve of two input quantities, the slope of each point is the adaptive adjustment rule of the quantization factors K 1 and K 2 , 2 is the constant quantization factor of the adjustment, and 3 is the quantization curve of the output quantity, The slope of each point is the adaptive regulation of K3.
Car Megaphone,Megaphone For Truck,Megaphone Speaker For Car,Auto Megaphone
yucheng county huibang electric technology ltd , https://www.hbspeaker.com