This article will in-depth analysis of the autonomous driving system, the software systems, hardware, and related companies and industry developments.
The control system is the brain of the smart car. It collects information from a large number of sensors in the perception layer, processes and analyzes it, perceives the surrounding environment, and plans driving routes; when the vehicle is running, it needs to control the execution layer's equipment to respond to the vehicle according to the surrounding changes. control;
Autonomous driving controllers need to receive, analyze, and process a large number of and complex signals, so multi-domain controllers that provide support for path planning and driving decisions will be a development trend.
As the main participants in autonomous driving, the strategies of automakers and Internet companies are quite different. The former aims at mass production and sales. The gradual upgrade from L2 and L3 autonomous driving is a more realistic and economical strategy.
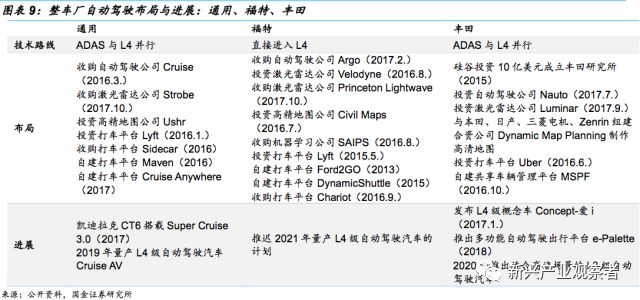
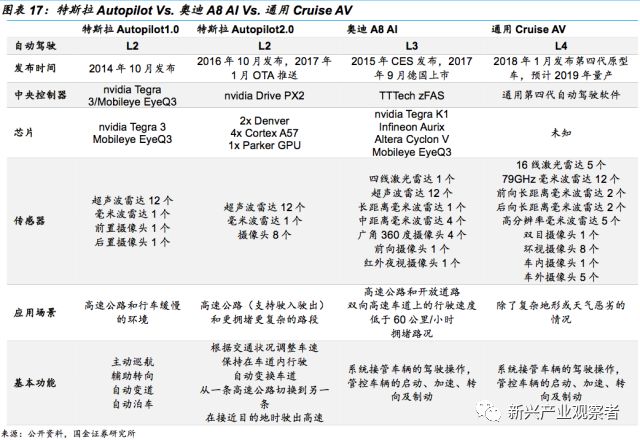
In terms of automakers, many automakers have put forward their own solutions: from L2 to L4, we analyzed Tesla’s Autopilot, Audi’s A8 AI and GM Cruise AV respectively;
L2 system solutions have generally entered the mass production stage: Tesla Autopilot adjusts lanes, drives out of high speed, etc., OTA update can help system training and iterative algorithms;
The Audi A8 is the first mass-produced car with L3 autonomous driving capability on the market: the central controller zFAS is its core technology for autonomous driving;
GM announced plans to mass-produce the Cruise AV L4 self-driving car in 2019: there is no steering wheel, brake and accelerator pedal in the car.
For Internet companies such as Google and Baidu, autonomous driving is an important opportunity to cut into the life scene of travel, and they are more inclined to build system platforms with the goal of fully autonomous driving.
Google’s Waymo has conducted in-depth cooperation with a small number of OEMs and sensor manufacturers, and has made breakthrough progress with the leading advantages of software algorithms, and will cooperate with OEMs to develop customized vehicles into commercial operation;
Relying on the Apollo platform, Baidu integrates a number of upstream and downstream enterprises in the industry chain, aiming to provide partners with an open, complete and secure software platform.
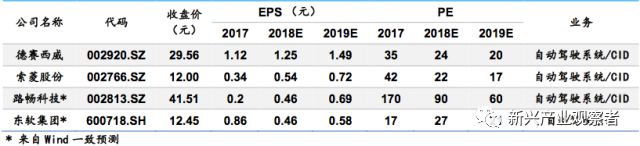
Based on the industry prospects and the huge potential market, the industry is given a buy rating. Listed companies are optimistic about Desay SV and Soling, and it is recommended to pay attention to Luchang Technology and Neusoft Group.
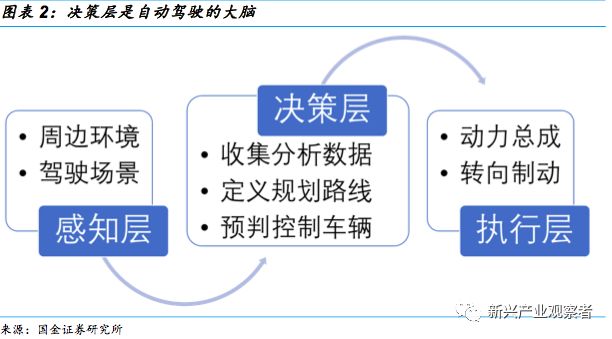
Summary: The decision-making layer is the brain of autonomous driving
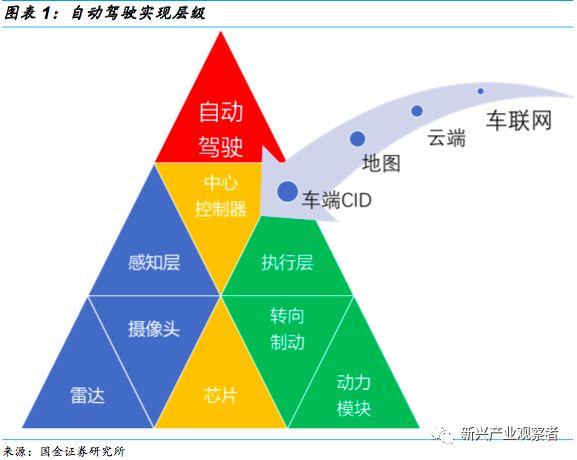
1.1 Realization of automatic driving: decision-making layer, perception layer, execution layer
Autonomous driving system can be divided into decision-making layer, perception layer, execution layer, and support for high-precision maps and Internet of Vehicles.
Decision-making layer: Make decision-making judgments based on the acquired information, determine appropriate working models, formulate corresponding control strategies, and replace humans in making driving decisions.
Perception layer: the collection and processing of environmental information and in-car information.
Execution layer: After the system makes a decision, it replaces humans to control the vehicle and feeds back to the underlying module to perform tasks.
1.2 The importance of decision-making level: processing data to control the core of the vehicle
The autopilot system formalizes driving cognition and uses the data expression language of driving cognition to design a universal autopilot software architecture. In this architecture, the decision-making layer is not directly coupled with sensor information. Instead, it completes autonomous decision-making based on the driving state formed by multi-sensor perception information, driving maps, and vehicle networking communication.
On the one hand, the decision-making layer needs to collect data from the perception layer, analyze and outline the surrounding environment, define driving scenarios, and plan driving routes.
On the other hand, the decision-making layer needs to control the execution layer, control vehicle power, steering, and braking according to the planned driving route, and predict road conditions to make corresponding vehicle control.
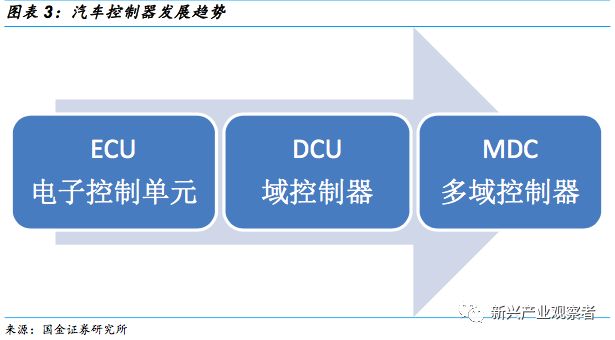
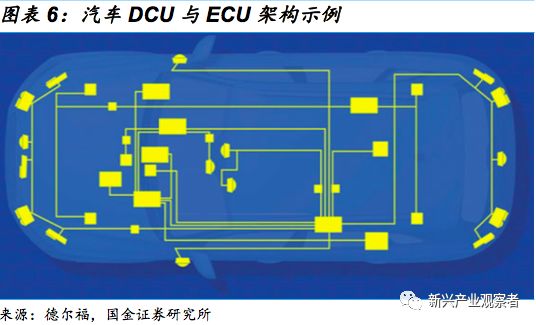
1.3 Development Trend: Multi-Domain Controller
The Multi Domain Controller (MDC) is an ECU that connects signals from different sensors, analyzes and processes the signals, and finally issues control commands. MDC is similar to the DCU (Domain Control Unit) domain controller. It is essentially to solve the problem that the car control system becomes complicated after the increase of car ECUs and the capacity reaches the upper limit.
In the field of autonomous driving, the controller needs to receive, analyze, and process a large number of complex signals. Multi-domain control is an inevitable development trend. For example, the central controller zFAS of Audi L3 level autonomous driving is a multi-domain controller.
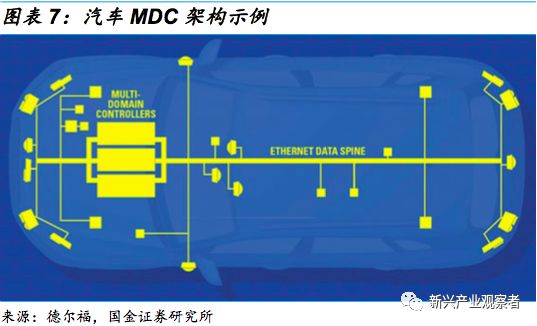
MDC multi-domain controller
The scalability of the MDC platform itself, the type and number of sensors that MDC can connect to are not fixed, and can be developed according to the needs of OEMs, especially to adapt to the sensor configuration of the automatic driving system of vehicles on different platforms;
Sensing and processing can be separated. Sensors and ECUs are no longer in a one-to-one relationship, but the central controller MDC accepts and processes signals in a unified manner. Especially for OEMs, sensor types and suppliers can be changed according to their needs.
1.4 Related companies
OEMs: Commercialization accelerates, plans are gradually mature, mass production and loading
2.1 Industry change trend: new cars are equipped with L3 as standard, and L4/L5 are gradually mature
Currently on the basis of ADAS, L2 to L3 level autonomous driving will gradually become the standard configuration of new models, generating a large amount of new demand, which is currently the main investment opportunity; L4 to L5 fully autonomous driving is also gradually maturing, once Commercialization will affect the future of the industry.
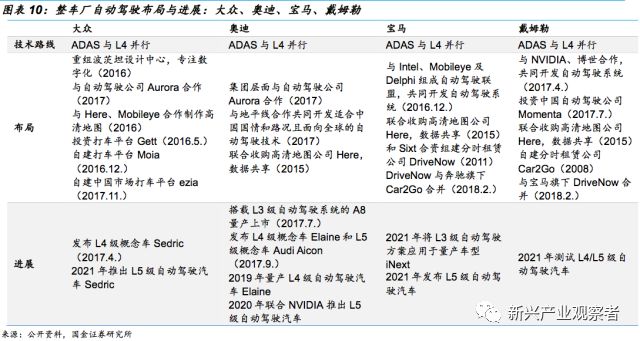
2.2 OEMs: Actively deploy and target the most reasonable solution for mass production and loading
From the perspective of traditional automakers, on the one hand, they are more cautious about autonomous driving. Everyone agrees that autonomous driving will be the future, but the prerequisite for developing autonomous driving is not to affect product development and sales at this stage; on the other hand, automakers are actively deploying Autonomous driving, continuously acquiring companies, strengthening its own development capabilities, has the deepest accumulation of technology patents related to autonomous driving.
And during the development process, the OEMs should balance the relationship between cost, time and technology realization, and take the most reasonable plan for mass production and loading as the phased goal.
The major traditional automakers have their own R&D teams in the field of autonomous driving, and they have invested hugely, and the results are gradually showing. L2 system solutions have generally entered the mass production stage, and Audi's zFAS system is the first in the market. L3 solutions for mass production and loading of vehicles, L4 solutions are also under development, and even GM announced plans for mass production of L4 autonomous vehicles in 2019.
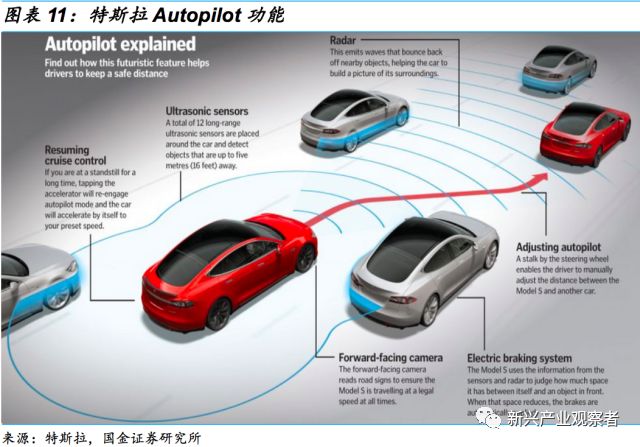
2.3 L2 level solution: Tesla Autopilot
Tesla's solution is similar to the iterative method of Internet companies and consumer products. Each Tesla will be equipped with the latest hardware at the time, and then continuously update the firmware through OTA to obtain more complete driving assistance or autonomous driving functions. A huge user group can continuously provide driving data of real road conditions to help Autopilot train and iterate algorithms. Currently Autopilot has released versions 1.0 and 2.0.
Autopilot is equivalent to L2 automatic driving, which can adjust the speed according to traffic conditions; keep driving in the lane; automatically change lanes without driver intervention; switch from one highway to another; drive out of the highway when approaching the destination; Automatic parking when approaching the parking lot.
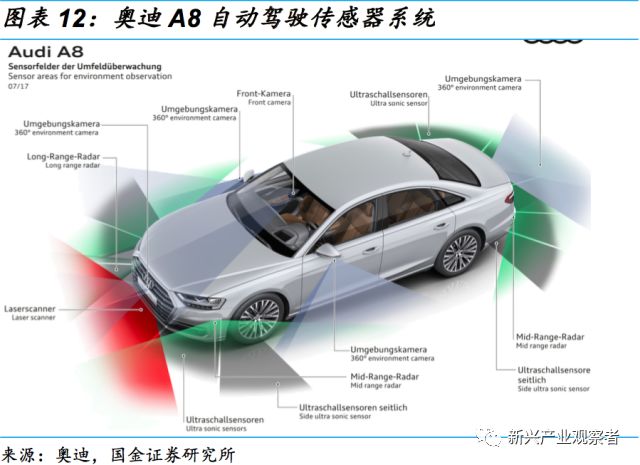
2.4 L3 level solution: Audi A8 AI
It is the first mass-produced car with L3 level automatic driving capability on the market. Under certain specific conditions, such as parking and driving away, driving at speeds below 60 kilometers per hour or traffic jams, the system will take over the driving control of the Audi A8 , And the driver does not need to continuously monitor the driving and operation of the vehicle.
The entire automatic driving system consists of a safety computer, instrument panel, NMI user interactive navigation system, electronic brake assist Brake Boost, electronic stability system ESC, electronic steering control EPS, engine control unit, transmission control unit, body computer, rear wheel steering system, It is composed of Gateway, electronic suspension control platform EEP and central automatic driving controller zFAS.
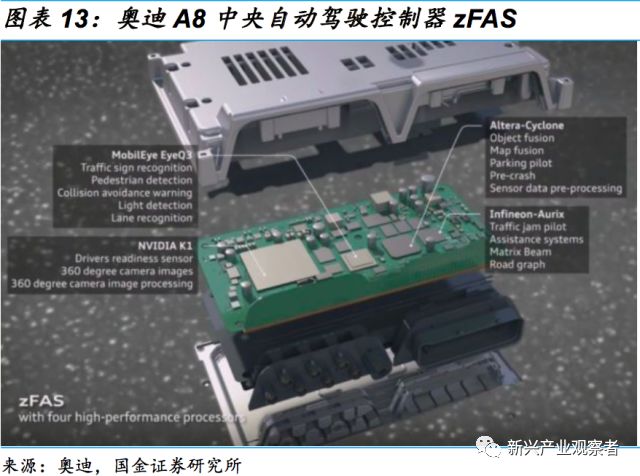
The central controller zFAS is the core technology of its autonomous driving. With the evolution of multiple generations, zFAS has finally changed from a huge prototype to a miniaturized and adapted to automotive requirements. zFAS is the abbreviation of zentrales Fahrerassistenz-Steuergeraet in German. Its structure includes four parts: front image processing unit, panoramic image processing unit, sensor fusion main control unit and application main control unit.
zFAS is a collaboration between Audi and Delphi, NVIDIA, TTTech, and Mobileye. Delphi provides hardware, TTTech provides software support (which can reach the highest safety level of ISO26262 ASIL D), NVIDIA provides GPU, Mobileye provides vision chips, and core processors include :
Nvidia’s Tegra K1 contains 192 GPUs for 4-way surround view image processing
Infineon's Aurix multi-core microcontrollers are used to provide security services and meet security standards such as ISO 26262
Altera's Cyclone 5 is used for high-speed processing signal fusion based on FPGA technology, including obstacles, map fusion and various sensor preprocessing
Mobileye's EyeQ3 is a closed chip for visual signal processing
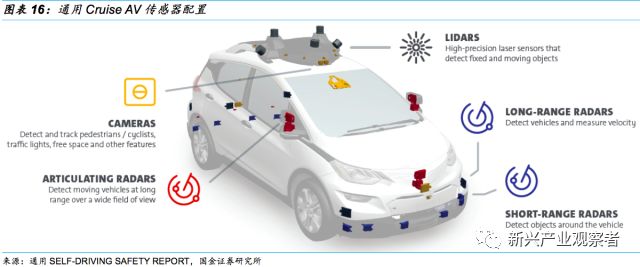
2.5 L4 level solution: General Cruise AV
On January 11, 2018, GM and Cruise Automation announced their fourth-generation driverless car concept prototype. This car is called Cruise AV and is modified from Bolt EV. There is no steering wheel, brake and accelerator pedal inside.
GM hopes to put this model into their shared travel fleet in 2019. But before that, they need the consent of the US government. In addition, seven states also need to apply separately.


The sensing layer is equipped with 5 lidars, 21 millimeter wave radars and 16 cameras:
5 lidars: Velodyne’s VLP16 16-line lidar;
21 millimeter wave radars: 12 79GHz millimeter wave radars are provided by Japan ALPS, 2 forward and 2 backward long-distance millimeter wave radars are speculated to be provided by mainland Germany, the model may be ARS-408; 5 high resolution millimeter waves The radar is provided by Bosch, Germany, mainly on the sides and front of the car.
16 cameras: 10 on the roof, including a binocular camera with a baseline length of about 8 cm, and 8 360-degree surround view cameras. There are infrared LEDs around the cameras, which can work in low illumination or even dark night. There is a non-driving version of the Bolt monocular camera in the rearview mirror, and a long-distance monocular camera in the foremost position of the vehicle. There are two cameras on the outside mirror and the rear of the car.
2.6 Tesla Autopilot Vs. Audi A8 AI Vs. General Cruise AV
Technology companies: pioneers of autonomous driving, disruptors of future mobility
From the perspective of technology companies, they have a more positive attitude towards autonomous driving. By virtue of their leading advantages in software algorithms, technology companies have entered the development and testing of autonomous driving very early, and are early pioneers; and technology companies and The cooperation of OEMs to develop customized vehicles and quickly put them into commercial operation will also be a disruptor of future travel.
On the one hand, these technology companies have made breakthroughs in the field of autonomous driving. While cooperating with automakers, they also maintained their independence and maintained the efficient execution and development speed of technology companies.
On the other hand, the entry of big capital into this industry is bound to greatly promote the development of the driverless industry, and competition will become more intense.
3.1 Waymo
Google's parent company Alphabet's independent subsidiary focused on the development of autonomous driving systems. Google started its autonomous driving project in 2009, and established Waymo as an independent entity in 2016.
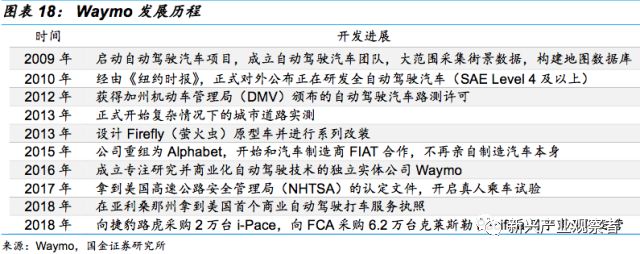
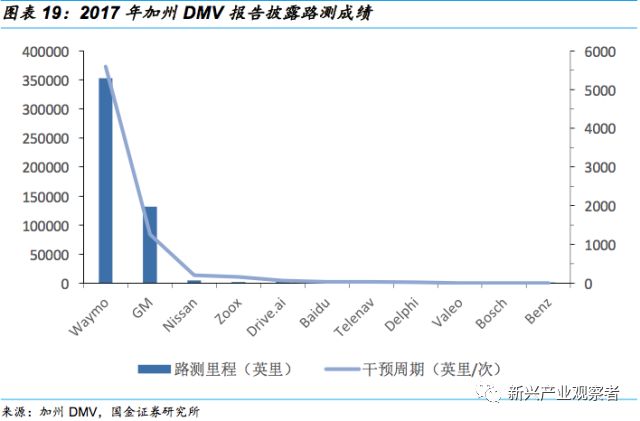
Data disclosed in the 2017 California DMV (california department of motor vehicles) autonomous driving report shows that Waymo's fleet size, road test mileage and manual intervention cycle are all leading the way. The real road test mileage reached 3.5 million miles in 2017 and currently exceeds 500. 10,000 miles, the simulated road test mileage exceeded 2.5 billion miles, and the California open road test mileage was 352,545 miles, especially the manual intervention cycle, reaching 5596 miles per time. The second GM was 1,254 miles. It can be seen from the report that the larger the fleet, the longer the road test mileage, the longer the intervention period. Therefore, the research and development of autonomous driving systems is also a project that requires large financial resources and time investment.
According to the Waymo safety report, the company's self-driving vehicles are completed in four steps:
"Where am I": A high-definition 3D map depicting the target area in advance
"What's around me": Perceive the surrounding environment through sensors
"What will happen below": Process environmental information and predict changes in the surrounding environment
"What should I do": plan route, vehicle execution
In the model cooperating with Chrysler, a car is equipped with 5 lidars, 3 at the front, 1 at the top and 1 at the rear; 4 millimeter-wave radars, 2 at the front and rear; 1 camera at the Top; 1 other supplementary sensor, located at the top. Because it is a test vehicle, the number of installed sensors is large, the configuration redundancy is relatively sufficient, and the cost is also high.

In general, Waymo is the most comprehensive self-driving company. The size of the road test fleet and the road test mileage are in the forefront, and the road test results are good, with an average of 5596 miles requiring only one manual intervention. At present, Waymo has started the passenger-carrying trial operation of unmanned vehicles in Arizona, USA. It has also ordered 20,000 I-PACE pure electric vehicles from Jaguar Land Rover on a large scale, and purchased 62,000 Chrysler Pacifica from FCA, ready to invest The formal commercial operation of autonomous driving.

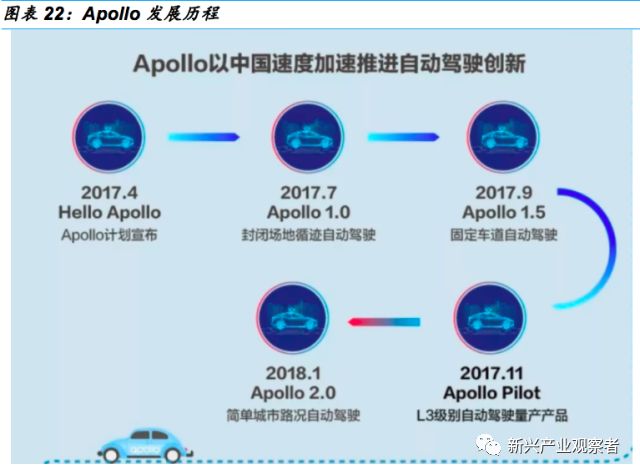
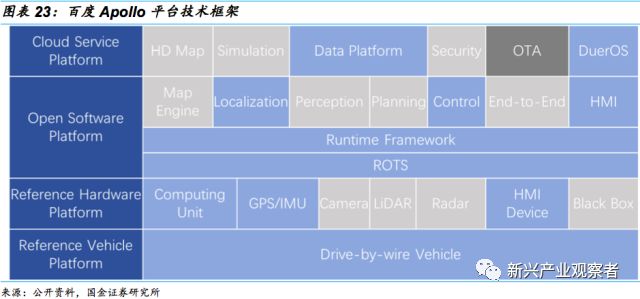
3.2 Baidu Apollo
The Apollo plan was released in April 2017. It integrated the Internet of Vehicles, L3, and L4 departments within Baidu to strengthen competitiveness, and acted as the flag bearer of China’s autonomous driving externally, convening a major alliance to bring car companies and suppliers together. Involvement, on the one hand, strengthen cooperation within the alliance, on the other hand, seek cooperation with the government and absorb external funds.
The Apollo platform is a complete set of software, hardware and service systems, including four parts: vehicle platform, hardware platform, software platform, and cloud data services. It aims to provide an open, complete and safe software platform to partners in the automotive industry and autonomous driving, helping them to combine vehicles and hardware systems to quickly build their own complete autonomous driving system.
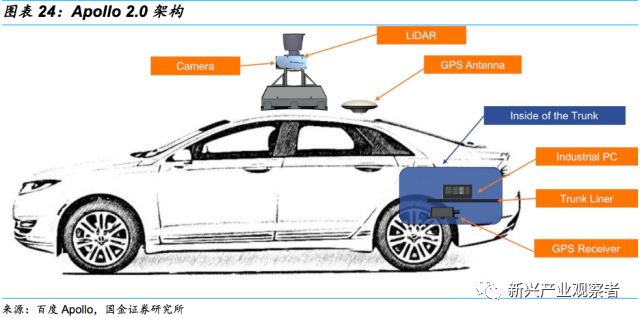
Hardware level:
Computing Center: Neousys Nuvo-6108GC, x86 architecture industrial control computer;
CAN communication card: ESD CAN-PCIe/402-B4, for signal communication with the car executive layer;
GPU and IMU: NovAtel SPAN-IGM-A1 or NovAtel SPAN ProPak6 and NovAtel IMU-IGM-A1 for GPS positioning and inertial positioning;
Lidar: Velodyne HDL-64E S3, scanning distance up to 120 meters, horizontal 360 degree scanning, vertical FOV 26.9 degrees;
Millimeter wave radar: Continental's ARS408-21, vehicle front detection;
Camera: Leopard Imaging LI-USB30-AR023ZWDR.
Software level: Ubuntu Linux recommended version 14.04, including general modules, control modules, data modules, calibration modules, communication modules, drive modules, deep learning modules, positioning modules, monitoring modules, perception modules, prediction modules, path planning modules, etc.

The overall workflow is roughly as follows: The path planning module calculates specific navigation information according to the destination location, and the data captured by lidar, millimeter wave radar and cameras are used with high-precision maps to calculate 3D obstacle information and recognize traffic signs and For traffic signals, the possible trajectories of obstacles are calculated through the prediction module, and the specific lanes the vehicle should go according to the vehicle positioning module and the planning module are obtained; in the process of execution, the vehicle control module calculates the acceleration, braking and direction in combination with the current state of the vehicle The operation signal is output to the vehicle, realizing the automatic driving of the vehicle.
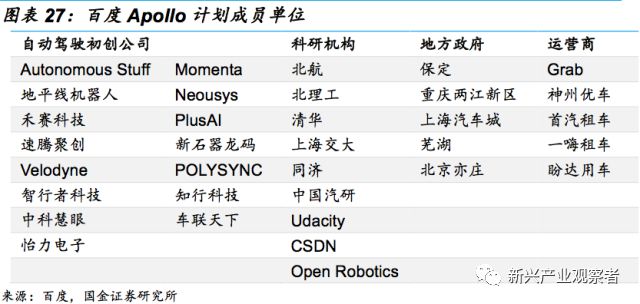
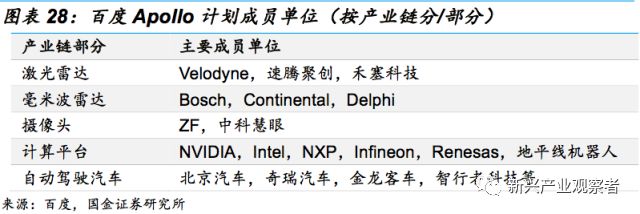
Baidu’s Apollo plan is characterized by "opening" and "alliance". Since the plan was announced, nearly 100 automakers, Tier1, Tier2, scientific research institutions, and operators have become allies, including Beijing, Shanghai, Chongqing, and Fujian. Tan and other local governments.
Just a week ago, Baidu Apollo and Chongqing Lifan Group's time-sharing platform Panda Cars and Chongqing Liangjiang New District cooperated to start a one-month trial operation of autonomous driving shared cars in the Liangjiang New District Internet Industrial Park.
The minibus "Apollon" cooperating with King Long is expected to be mass-produced in 2018, maintaining a leading position in the research and development of domestic autonomous driving systems.

3.3 Waymo Little League Vs. Baidu Apollo Major League
Through the above analysis, we can see that Waymo is following a "small alliance" strategy and has in-depth cooperation with a few automakers (Chrysler, Jaguar, Honda, etc.) and sensor manufacturers. It has the first-mover advantage, accumulates more road test mileage and larger fleet size, and has better road test results. Baidu is following a "big alliance" strategy, relying on the Apollo platform to expand its "friend circle" as much as possible. But apart from data sharing, no mature cooperation model has been seen yet.
3.4 Safety strategy: Waymo gradually evolves Vs. Mobileye does not cause accidents
3.4.1 Waymo
The reason why Waymo's safety strategy is called "gradual evolution" is related to its autonomous driving strategy and the emphasis on gradually approaching the real world test.
In terms of autonomous driving strategy, Waymo adheres to the goal of "creating a good driver" and insists on direct L4 level autonomous driving research and development. The goal is to directly replace the driver when the technology is mature. This is related to the nature of its Internet company. First of all, it is not a hardware company, so after 2015, it gave up its independent research and development of cars and instead cooperated with companies such as FCA. In addition, although the laser radar and other hardware equipment it currently uses is self-developed, it has not sold separately, and a lot of resources are still used in the research and development of autonomous driving systems. Of course, as a company under Google's parent company Alphabet, one of the biggest advantages is that the parent company has strong financial strength and can support huge research and development expenses without the need to generate profits in advance.
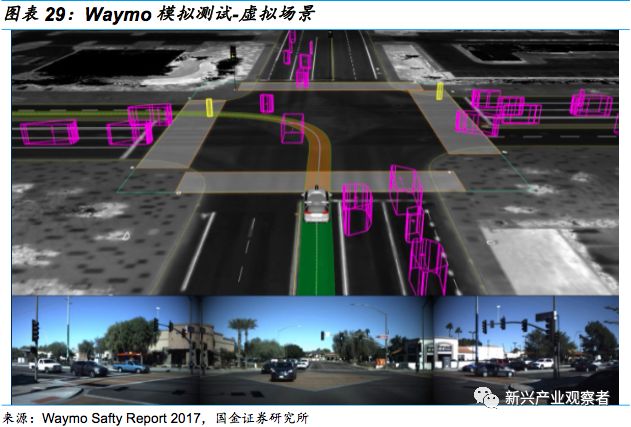
Take autonomous driving software as an example to illustrate Waymo's strict test procedures
1. Simulation test:
In the simulation, the test software is strictly updated, and then deployed to the model to simulate the most challenging situation encountered by the vehicle on the public road, and transform it into a virtual scene for our self-driving car software Practice in simulation:
2. Closed road test:
Waymo has set up a 91-acre closed road test park in California, including all facilities such as highways, suburban driveways and railroad crossings. The team uses the park to verify the software and conduct phased analysis of challenging or rare scenarios.

3. Driving on public roads:
The test provides a continuous feedback loop, that is, the engineer observes the actual situation, adjusts the software to optimize driving, and then updates it to continuously improve the system. This iterative approach helps expand the operational design domain and vehicle functions, and safely expand our capabilities so that vehicles can safely operate at the L4 level.

3.4.2 Mobileye
Mobileye's safety strategy for autonomous driving is very different from Waymo, because it is essentially a hardware company, and its business model is "selling hardware", which makes it impossible for their safety strategy to stick to everything and extensive testing like Waymo. Its security strategy can be expressed as “shaping†a real-world mapping with a strong theoretical model (ie RSS model), and formulating a series of conditions that satisfy “no accidents (different from accidents)†based on this , So as to minimize the time and resources spent testing.
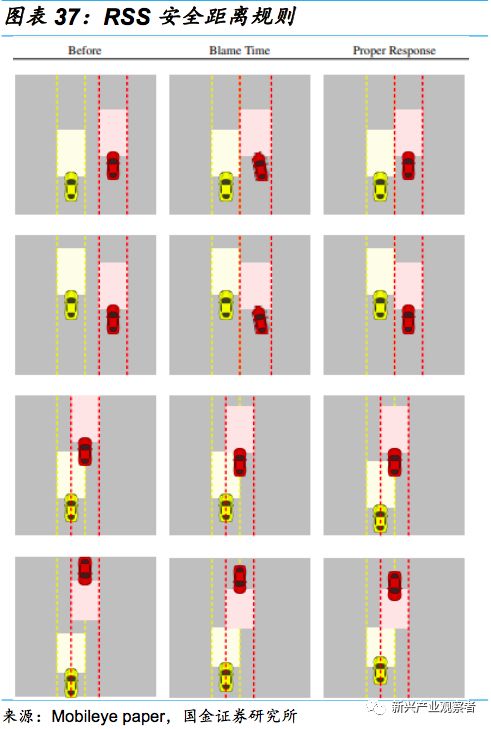
Multi-party security responsibility sensitive security (RSS) model
The RSS model transforms the basic principles of safe driving into mathematical formulas that machines can understand. For example, the safety distance when following other cars or changing lanes, road priority and obstacle avoidance, etc. If the instruction issued by the AI ​​system violates any of the basic principles, RSS will reject the instruction.
Absolute safety is impossible. The concept of "accident responsibility" is introduced, that is, the premise of RSS is that although autonomous vehicles may involve accidents, they will never cause accidents. It mainly includes the following four rules:
1. Keep a safe distance from the vehicle in front of you so that you can stop in time when you brake suddenly;
2. Keep a safe distance from the vehicle on your side, and when performing lateral maneuvers and cutting into the trajectory of another vehicle, you must allow other vehicles to have enough space to respond;
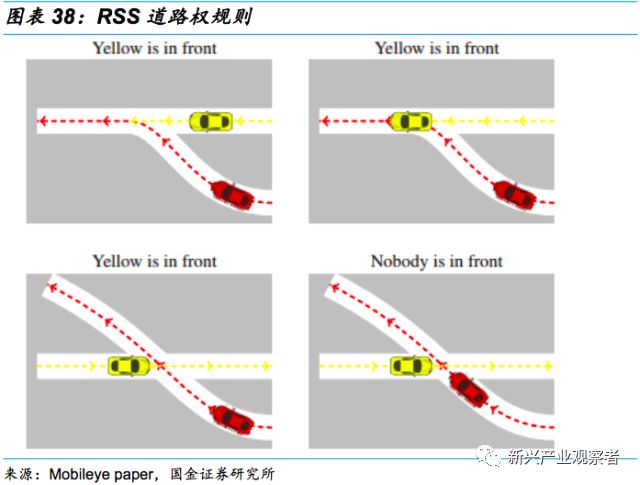
3. The "right to road" rule should be respected, but the "right to road" is given, not by "winning";
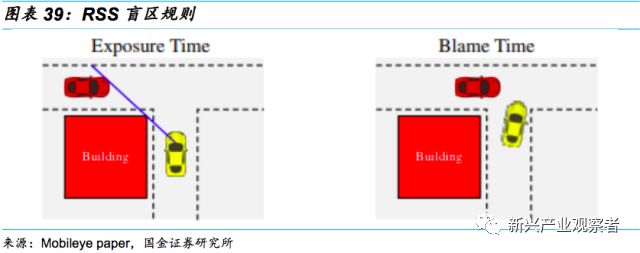
4. Be careful of blind spots, for example, a child may be blocked behind a parked car.
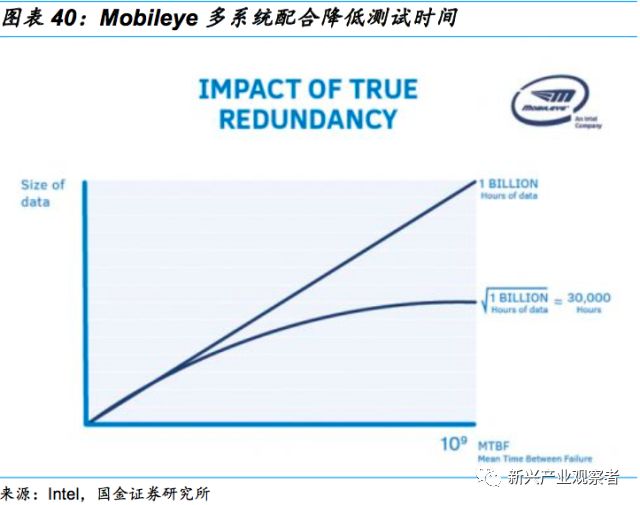
Summary: Mobileye's safety strategy can be summarized as "no accident" and "multi-system cooperation", that is, a theoretical model is used to shape a rule that does not cause an accident, so that even if an accident occurs, the autonomous vehicle is not the person responsible. In addition, through the cooperation of two relatively independent systems, the scenes that caused the problems were independently discovered, and the problems were solved together, resulting in the effect of greatly shortening the test time. This is the strategy that Mobileye, as a hardware manufacturer, does not have much resources and time to carry out a wide range of testing conditions. It is also the choice when the start of the test is late and Waymo is at a disadvantage.
3.4.3 Waymo Vs. Mobileye

High quality music output with elegant appearance
different power,rated power and rated impedance
Can be used in places with high ambient noise such as in basements, car parks, open air theme parks or in heavy machinery roomsPossible to deliver the regular sound to the distance
Applications: used in background music system, commercial sound system, public address system. For example: hotels, airports, harbors, shopping malls, super markets, banks, schools ,railway stations, churches, restaurants etc.



High Power Horn Speaker,Speaker Horn,Speakers Horns,High Quality Speaker,Horn Loudspeaker
Taixing Minsheng Electronic Co.,Ltd. , https://www.ms-speakers.com